The Effect of Resist and Assist Torque of Hip Joint Motor-based Gait Assistance Robot on Gait Function in the Elderly
Article information
Abstract
OBJECTIVES
The purpose of this study was to investigate the effects of assist and resistance torque on the spatiotemporal gait characteristics, and the symmetry and asymmetry of gait using a Gait Enhancing and Motivating System (GEMS) in the elderly.
METHODS
A cross-sectional and repeated measure design was used. A total of 18 participants (9 males, 9 females; age: 63.5 ± 5.02 years; mass: 64.26 ± 6.87 kg; height: 164.06 ± 7.15 cm) were recruited from a local community, and spatiotemporal gait data were collected with OptoGait system and GEMS. Spatiotemporal gait variables and differences between the dominant and non-dominant legs of these variables were assessed (step length, step time, stance phase, swing phase, single support, load response, pre swing phase, stride time, stride length, double support, cadence, and gait speed). The effects of three modes including normal, assist, and resist modes using GEMS were investigated twice for each participant on a 9-meter walkway. A one-way repeated measure analysis of variance followed by Bonferroni post-hoc tests was conducted.
RESULTS
The assist mode increased step time, swing phase, stride time and reduced stance phase, pre-swing phase, double support, cadence, and gait speed as compared to normal mode. The resist mode increased stance phase, load response, pre-swing phase, double support, cadence, and reduced step time, swing phase, and stride time. In dominant leg, assist mode showed increased step time and reduced pre-swing phase than normal mode, and greater step time than resist mode (p < 0.05). However, there was no effect of external torque on symmetry and asymmetry between both legs (p > 0.05).
CONCLUSIONS
The resistance and assist torque of GEMS alter spatiotemporal characteristics during the stance and swing phase of gait in the elderly. However, the resistance torque and assist torque of GEMS did not increase or decrease the gait asymmetry between the dominant and non-dominant legs.
서론
노화는 신경계, 골격계, 근육계의 질적 및 양적 변화를 일으키기 때문에 보행 기능 및 운동수행력을 변화시킨다[1-5]. 인체 움직임과 관련 깊은 근신경계의 경우 노화의 영향으로 근 질량의 감소, 속근 섬유의 감소로 인한 근섬유 비율의 변화, 최대 수의적 신경 활성화(maximum voluntary neural activation) 및 신경 전달 기능의 변화가 나타나기 때문에[3-5], 결과적으로 노인은 근력, 순발력, 심폐지구력, 균형능력, 근지구력의 감소를 보인다[6,7]. 따라서, 노화에 의한 신체 능력의 감소는 신체 활동량 및 활동 수준의 감소로 이어지며, 이로 인한 개인 삶의 만족도와 질 또한 감소하는 것으로 나타났다[8-10].
노인은 보행 시 한발짝 길이(step length)가 감소하고 기저면(base of support)을 증가시키는 패턴을 구사함으로써[11], 감소한 신체 능력 및 안정성을 보완한다고 할 수 있다. 또한, 노인은 젊은 성인과는 다른 보행을 보이는데, 대표적으로 감소한 보행 속도 및 한발짝률(cadence), 증가한 한발짝(step) 및 한걸음(stride) 시간 등의 패턴을 보여 부동성(immobility)과 변동성(variability)을 가진 보행을 구사한다고 할 수 있다[11-13]. 보행은 일상생활과 가장 밀접한 동작이므로, 노인의 보행 특성을 살펴보는 연구와 중재전략을 통해 변화된 보행을 확인하는 연구는 중요하다고 할 수 있다.
보행의 기능 저하와 더불어 양 다리 간의 비대칭성(asymmetry)은 노인 보행의 대표적 특징 중 하나이다[14]. 두 다리 중 하나는 이동 운동기술 및 역동적인 동작 중 체중을 지지하는 데 특화되었다는 관점에서 우세 다리(dominant leg)와 비우세 다리(non-dominant leg)의 역할이 다르기 때문에, 비대칭성은 노인에게 더욱 부각되는 특성이다[15]. 체중을 지지하는 다리는 비우세 다리 또는 지탱하는 다리(stance leg)로 정의되고, 우세 다리 또는 선호 다리(preference leg)로 정의되는 다리는 주로 큰 힘이나 정확성을 요구하는 운동을 수행하는 역할을 담당한다[15-17]. 그러므로 노인의 보행 동작 검사 시 역할에 따른 양 다리 기능 및 비대칭성 또한 함께 확인해야 한다.
엉덩관절은 하지에서 가장 몸쪽(proximal)에 위치한 관절로써 하지 움직임에서 중요한 역할을 수행한다. 무릎 및 발목 관절에 비해 강한 근력을 가진 엉덩관절은 특히 보행의 추진(push-off) 구간에서 강한 근 파워와 역학적 에너지 생성을 담당하는 관절이다[18,19]. 또한, 엉덩관절의 굽힘(flexion) 및 폄(extension) 모멘트와 파워는 보행 속도를 결정짓는 역학적 요소이므로, 엉덩관절은 보행의 기능을 결정짓는 주요 하지관절이라 할 수 있다[20]. 보행 시 노인은 젊은 성인과 중년층에 비해 중간볼기근(gluteus medius)과 넙다리두갈래근(biceps femoris)의 높은 활성도를 보이는 특성이 있기 때문에, 노인을 대상으로 보행 과제를 검사할 때 엉덩관절과 주변 근육의 역할에 주목할 필요가 있다[21].
최근 들어 엉덩관절에 보조 토크를 적용한 보행 보조 기구 로봇에 대한 연구가 진행되고 있다. Lee와 공동 연구자[21]는 노인을 대상으로 보행 보조 로봇을 통해 엉덩관절에 위치한 모터에서 생성된 보조 토크(assist torque)를 적용하여 도움 모드(assist mode)를 운용한 결과, 보행 속도 증가, 한발짝률 증가를 포함한 보행 기능의 향상을 보여주었다. 또한, 엉덩관절에 적용한 보조 토크는 큰볼기근(glutesus maximus), 중간볼기근, 넙다리곧은근(rectus femoris), 안쪽넓은근(vastus medialis), 안쪽장단지근(medial gastrocnemius)의 활성을 감소시켜 하지 근육의 부담을 감소시키는 것으로 나타났다[12,21]. 보행 보조 로봇의 도움 모드는 착용하지 않았을 때와 비교했을 때 계단 오르기 시 산소소비량과 에너지 요구량 또한 감소하는 것으로 나타났다[22]. 뇌졸중(stroke)과 같이 이동성이 감소한 환자들을 대상으로 4주간 보행 보조 로봇을 이용하여 보행 훈련을 실시한 다른 연구에서도, 보행 기능의 개선뿐만 아니라 시간적 및 공간적 보행 기능의 불균형을 개선하였으며, 하지 근육 요구량의 균형 개선에 효과적인 것으로 나타났다[23]. 따라서, 엉덩관절로 전달되는 토크를 기반으로 한 보행 보조 로봇은 노인의 이동성 향상 측면에서 유용한 도구라고 할 수 있다.
엉덩관절의 파워의 증가는 보행 속도 및 기능의 향상과 관련이 있다[24]. 관절의 파워는 근력과 근육의 수축 속도로 결정되므로, 저항 훈련은 근력을 향상한다는 관점에서 그리고 가속 훈련은 신경근 전달 속도를 빠르게 한다는 측면에서 관절 파워의 향상을 도모할 수 있다[25]. 그러나 현재까지 노인을 대상으로 보조 로봇을 활용한 단면 조사 연구 및 효과 검증 연구는 보조 토크에 의한 가속의 영향만을 검증한 제한점이 존재한다. 따라서, 근력 향상에 요구되는 저항 토크를 적용하였을 때 보행 특성의 변화를 살펴보는 연구가 필요하다고 할 수 있다. 또한, 외부의 보조 및 저항 토크(resist torque)는 개인이 가진 비대칭성을 증가시킬 수 있으므로, 이동 기능이 저하된 노인의 특성상 보행 보조 로봇으로 인한 비대칭성의 변화를 확인하는 것이 중요하다고 할 수 있다.
따라서 본 연구의 목적은 엉덩관절 모터 기반의 보행 보조 로봇을 이용한 도움 및 저항 토크가 노인의 1) 보행을 질적 및 양적으로 변화시키는지 확인하고, 2) 보행의 대칭성/비대칭성에 영향을 미치는지 검증하는 것이다. 본 연구에서 설정한 가설은 다음과 같다: 1) 엉덩관절 모터 기반의 보행 보조 로봇을 이용한 보조 토크와 저항 토크는 노인의 한발짝 길이 및 시간, 한걸음 길이 및 시간, 디딤기, 흔듦기, 한다리 지지기, 양다리 지지기, 부하 반응기, 걸음주기, 한발짝률 등의 시공간 보행 특성을 변화시킬 것이다. 2) 엉덩 관절 모터 기반의 보행 보조 로봇을 이용한 가속과 감속은 노인 보행의 비대칭성을 증가시킬 것이다.
연구방법
1. 연구대상
웨어러블 보행 보조 로봇 착용 실험을 수행을 수행하기 위해서 신체 건강과 심리사회적 건강 수준이 모두 양호한 연구참여자 모집이 필요하므로, 지역사회 내 중고령자가 사회적 교류를 하는 주요 장소인 종교기관, 경로당, 노인복지관 등의 여가시설과 온라인 공동체를 통해 연구참여자를 모집하였다. 여가시설의 경우 기관의 허가 하에 연구참여자 모집 공고문을 게시한 후, 참여를 희망하는 자를 대상으로 연구의 취지와 절차를 설명하고 서면 동의를 받아 연구참여자를 모집하였다. 결과적으로 본 연구는 일상생활 및 신체활동에 이상이 없고 보행 보조기구를 사용하지 않는 만 55세 이상 75세 미만의 중고령자 노인 중 자발적 참여의사를 밝힌 18명을 모집하였다(9 males, 9 females; age: 63.5 ± 5.02 years; mass: 64.26 ± 6.87 kg; height: 164.06 ± 7.15 cm). 본 연구는 연세대학교 생명윤리심의위원회를 통해 승인받은 내용을 기반으로 수행하였다(No. 7001988-202110-HR-1391-02).
2. 측정 항목 및 도구
1) 웨어러블 보행 보조 로봇
본 연구에서 사용된 보행 보조 로봇은 엉덩관절에 위치한 모터를 기반으로 작동된다(Gait Enhancing and Motivating System [GEMS], Samsung Electronics Co., Suwon, Republic of Korea). 보행 보조 로봇은 엉덩관절의 굽힘과 폄 동작을 포함한 보행 시 가속 및 저항 모드(resist mode)를 운용할 수 있으며, 이를 위해 엉덩관절 모터에서 토크를 생성할 수 있도록 설계되었다[23]. 보행 보조 로봇은 양측 엉덩관절에서 작동할 수 있도록 각도 센서와 구동기로 구성된다. 보행 보조 로봇의 착용부는 연구참여자의 허리 둘레에 맞게 조절될 수 있으며, 모터와 연결된 프레임은 생성된 토크를 대퇴로 전달한다. 측정자는 태블릿 PC(Galaxy Tab3 8.0 with Android 4.2 OS, Samsung Electronics Co, Ltd, Republic of Korea)를 사용하여 운용하였다.
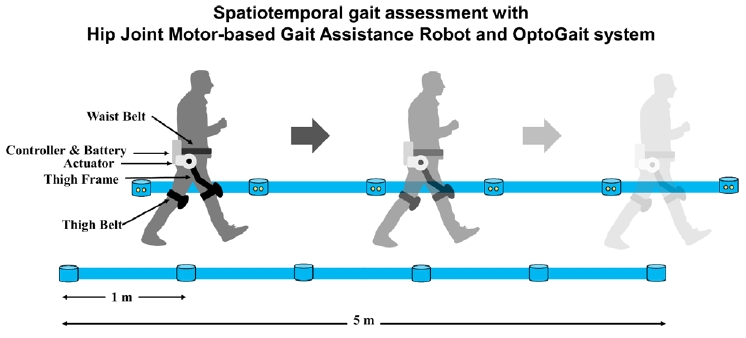
Gait-enhancing Mechatronic System GEMS using Hip Joint Motor-based Robot.
2) 시공간 보행 기능
시공간 보행 기능 변인은 Photoelectric Cell을 이용한 OptoGait 시스템을 이용하여 수집하였다(Microgait, Bolzano, Italy). 1m 길이의 송수신 장치 두 개를 1쌍으로 평행하게 배치하였으며, 총 5m 주로를 확보하기 위해 5쌍의 송수신기로 구성된 OptoGait 시스템을 설치하였다. 송신기(transmitter)와 수신기(receiver)는 지면으로부터 3mm 위에 위치한 1cm 간격의 96개 발광 다이오드를 통해 신호를 주고받는다[26]. 연구참여자가 송신기와 수신기가 위치한 주로를 지나갈 때 발광 다이오드 신호를 차단하여 발과 지면과의 접촉 시기, 면적 및 거리를 계산한다. OptoGait 시스템이 설치된 데이터 수집 구간 5m를 제외하고, 주로 앞뒤로 2m씩 더 확보하여 총 9m 주로에서 보행 검사를 실시하였다. 연구참여자는 속도에 제한받지 않고, 본인의 선호속도로 보행을 수행하였다. 시공간 변인 보행 변인으로서 주발과 비주발의 한발짝 길이, 디딤기(stance phase), 흔듦기(swing phase), 한다리 지지기(single limb support), 부하 반응기(loading response), 전 흔듦기(pre swing phase), 한발짝 시간(step time) 그리고 보행속도(gait speed), 보행 주기(gait cycle), 한발짝률, 한걸음 길이(stride length), 두발 지지기(double limb support), 보행속도(gait speed) 데이터가 수집되었다.
3. 자료처리
보행 기능 데이터는 일반 모드(normal mode), 저항 모드, 도움 모드 각각 2회씩 실시하여 수집하였다. 5m 구간의 주로에서 측정된 보행 동작의 시공간 데이터 평균값을 산출하였으며, 각 모드별 2회씩 측정한 데이터의 평균값을 분석하였다. 측정 순서는 정상모드, 도움모드, 저항모드 순으로 반복하였다. 보행 데이터는 OptoGait 소프트웨어(v1.12, Microgait, Bolzano, Italy)를 사용하여 처리되었다. 통계적 유의한 차이를 보이지 않아 주발과 비주발은 토크 간 비대칭성이 변화하지 않았다(p > 0.05).
4. 통계처리
수집된 모든 조사지 자료는 IBM SPSS 25.0(IBM Corp., Armonk, NY, USA)을 사용하여 분석되었다. 엉덩관절 모터 기반 보행 보조 로봇의 일반, 저항, 도움 모드 간 시공간 보행 변인과 주발과 비주발의 보행 기능 차이를 비교하기 위해 일원산 반복측정 분산분석(one way repeated measure analysis of variance)을 실시하였으며, 사후분석은 Bonferroni 검정을 이용하였다. Mauchly의 구형성 검정을 만족하지 않은 경우(p < 0.05), Greenhouse-Geisser 방법을 통해 자유도를 보정하였다. Partial eta squared의 효과 크기는 큼(large, ≥0.14), 중간(medium, ≥0.06) 작음(small, ≥0.01) 세 수준으로 분류하였으며, 사후분석의 효과 크기 계산은 Cohen’s d 공식을 이용하여 큼(large; ≥0.8), 중간(medium; ≥0.5), 작음(small; ≥0.2) 세 수준으로 분류하였다. 본 연구에서 수행한 모든 분석의 통계적 유의 수준은 α = 0.05로 설정하였다.
결과
1. 엉덩관절 모터 기반 보행 보조 로봇의 일반, 저항, 도움 모드 간 시공간 보행 변인 차이
보행 보조 로봇의 모드 간 한발짝 시간(F(2) = 8.955, p = 0.001), 디딤기(F(2) = 7.594, p = 0.002), 흔듦기(F(2) = 7.594, p = 0.002), 부하반응기(F(2) = 7.353, p = 0.002), 전 흔듦기(F(1.499) = 6.757, p = 0.008), 한걸음 시간(F(2) = 8.279, p = 0.001), 두발 지지기(F(1.478) = 8.056, p = 0.004), 한발짝률(F(2) = 9.378, p = 0.001), 보행속도(F(2) = 6.80, p = 0.003) 변인에서 통계적 유의한 차이가 나타났다 <Table 1>.
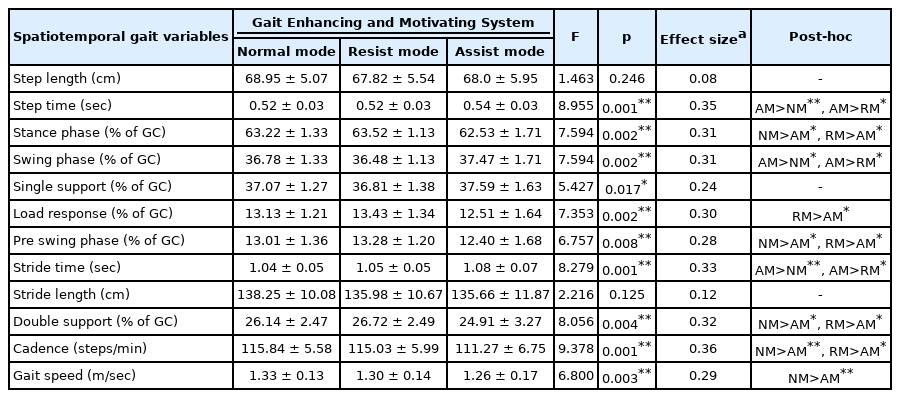
Difference in spatiotemporal gait variables between modes of Hip Joint Motor-based Gait Assistance Robot
사후분석 결과, 도움 모드는 정상 모드보다 긴 한발짝 시간(p = 0.003, d = 0.67), 긴 흔듦기(p = 0.038, d = 0.45), 긴 한걸음 시간(p = 0.006, d = 0.66) 그리고 적은 디딤기(p = 0.038, d = 0.45), 적은 전 흔듦기(p = 0.027, d = 0.40), 적은 두발 지지기(p = 0.036, d = 0.42), 적은 한발짝률(p = 0.003, d = 0.74), 느린 보행 속도(p = 0.007, d = 0.46)를 보였다.
저항 모드는 사후분석에서 도움 모드보다 긴 디딤기(p = 0.017, d = 0.68), 긴 부하 반응기(p = 0.017, d = 0.61), 긴 전 흔듦기(p = 0.033, d = 0.60), 긴 두발 지지기(p = 0.018, d = 0.62), 긴 한발짝률(p = 0.018, d = 0.59) 그리고 적은 한발짝 시간(p = 0.025, d = 0.67), 적은 흔듦기(p = 0.017, d = 0.68), 적은 한걸음 시간(p = 0.027, d = 0.49)을 보였다.
2. 엉덩관절 모터 기반 보행 보조 로봇의 일반, 저항, 도움 모드 간 주발의 시공간 보행 차이
보행 보조 로봇의 모드 간 주발의 시공간 보행 변인을 비교한 결과, 한발짝 시간(F(2) = 6.627, p = 0.004)과 전 흔듦기(F(1.434) = 5.479, p = 0.018) 변인에서 통계적 유의한 차이가 나타났다 <Table 2>. 사후 분석 결과, 도움 모드는 정상 모드(p = 0.008, d = 0.67)와 저항 모드(p = 0.043, d = 0.67)보다 긴 한발짝 시간을 보였다. 또한, 도움 모드는 사후분석에서 정상 모드보다 짧은 전 흔듦기를 나타냈다(p = 0.012, d = 0.44).
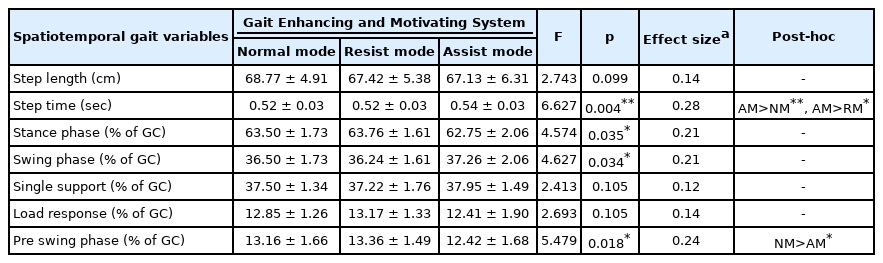
Difference in spatiotemporal gait variables of dominant leg between modes of Hip Joint Motor-based Gait Assistance Robot
지지기(F(1.291) = 4.574, p = 0.035)와 흔듦기(F(1.295) = 4.627, p = 0.034) 변인은 통계적 유의한 차이를 보였으나, 사후분석 결과 모드 간 차이는 나타나지 않았다(p > 0.05). 한발짝 길이, 한발 지지기, 부하 반응기 변인은 일반, 저항, 도움 모드 간 통계적 유의한 차이를 보이지 않았다(p > 0.05).
3. 엉덩관절 모터 기반 보행 보조 로봇의 일반, 저항, 도움 모드 간 비주발의 시공간 보행 차이
보행 보조 로봇의 모드 간 비주발의 시공간 보행 변인을 비교한 결과, 한발짝 시간(F(1.305) = 6.272, p = 0.014)과 부하 반응기(F(2) = 4.784, p = 0.015) 변인에서 통계적 유의한 차이가 나타났다 <Table 3>. 사후 분석 결과, 도움 모드는 정상 모드보다 긴 한발짝 시간(p = 0.011, d = 0.57) 그리고 적은 부하 반응기(p = 0.049, d = 0.42)를 보였다.

Difference in spatiotemporal gait variables of non-dominant leg between modes of Hip Joint Motor-based Gait Assistance Robot
지지기(F(2) = 3.358, p = 0.047), 흔듦기(F(2) = 3.356, p = 0.047), 한발 지지기(F(2) = 3.741, p = 0.034), 전 흔듦기(F(1.360) = 4.567, p = 0.033) 변인은 통계적 유의한 차이를 보였으나, 사후분석 결과 모드 간 차이는 나타나지 않았다(p > 0.05). 한발짝 길이 변인은 일반, 저항, 도움 모드 간 통계적 유의한 차이를 보이지 않았다(p > 0.05).
4. 엉덩관절 모터 기반 보행 보조 로봇의 일반, 저항, 도움 모드 간 주발과 비주발 차이 비교
보행 보조 로봇의 모드 간 주발과 비주발의 보행 비대칭성을 비교한 결과 <Table 4>, 한발짝 길이, 한발짝 시간, 지지기, 흔듦기, 한발 지지기, 부하 반응기, 전 흔듦기를 포함한 모든 시공간 보행 변인에서 통계적 유의한 차이를 보이지 않아 주발과 비주발은 토크 간 비대칭성이 변화하지 않았다(p > 0.05).
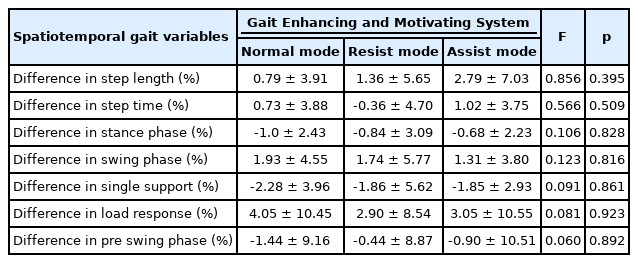
Comparison of spatiotemporal gait between dominant leg and non-dominant leg according to the mode of Hip Joint Motor-based Gait Assistance Robot
논의
본 연구는 엉덩관절 모터 기반의 보행 보조 로봇이 노인의 보행에 미치는 영향을 확인하고, 비대칭성을 증가시키는지 검증하기 위해 수행되었다. 보행 보조 로봇의 보조 토크를 이용한 도움 모드는 외부 토크가 없는 일반 모드에 비해 두 다리의 한발짝 시간 증가, 흔듦기 증가, 한걸음 시간 증가, 그리고 지지기 감소, 전 흔듦기 감소, 두다리 지지기 감소, 한발짝률 감소, 보행 속도 감소를 야기했다. 외부 토크를 이용한 저항 모드는 도움 모드보다 지지기 증가, 부하 반응기 증가, 전 흔듦기 증가, 두다리 지지기 증가, 한발짝률 증가 그리고 한발짝 시간 감소, 흔듦기 감소, 한걸음 시간 감소를 나타냈다. 다리의 역할에 따라 우세 다리와 비우세 다리를 각각 분석한 결과, 양 다리에서 도움 모드로 인한 한발짝 시간의 증가가 나타났다. 그러나 도움 모드와 저항 모드는 모두 양 다리의 비대칭성을 변화시키지 않았다.
엉덩관절에 보조 토크를 적용하여 도움 모드를 운용한 결과, 노인의 한발짝 및 한걸음 당 소요되는 시간이 증가하고, 한발짝률과 보행 속도가 감소하였다. 정상 모드(1.33 m/sec)와 비교했을 때, 도움 모드에서 나타난 보행 속도(1.26 m/sec)는 저항 모드(1.30 m/sec)와 동일하게 감소하는 양상을 보여주었다. 또한, 분당 한발짝 수를 나타내는 한발짝률은 정상모드(115.84 step/min)와 저항모드(115.03 step/min)에 비해 도움 모드에서 감소하였다(111.27 step/min). 이러한 결과는 엉덩관절의 보조 토크가 보행의 속도를 증가시키고, 더 많은 걸음을 걷게 할 것이라는 예상과는 다르게 나타났다. 엉덩관절의 파워 증가는 보행 속도를 향상시키고, 속도가 빠른 보행일수록 뒷발에서 앞발로 빠른 신체 무게의 이동이 필요하므로 엉덩관절과 무릎관절의 더 큰 관절 가동범위 및 균형 조절 능력을 요한다[27,28]. 이러한 관점에서 볼 때, 노인들에게 보행 보조 로봇의 추가적인 토크는 보행 시 일반적 걷기에 비해 높은 동적 안정성을 요구하는 과제이므로, 도움 모드의 보행은 일시적으로 기능이 감소되었다고 판단된다. 본 연구가 웨어러블 보행 보조 로봇에 익숙하지 않은 노인을 대상으로 단기적 노출의 효과를 검증했다는 점을 고려했을 때, 장기적으로는 보행 로봇의 보조 토크를 활용한 중재 전략이 일반적 걷기보다 더 나은 수단이 될 수 있을 것으로 사료된다. 일반 모드(26.14 % of gait cycle [GC])와 저항 모드(26.72 % of GC)에 비해 도움 모드(24.91 % of GC)에서 두발 지지기 시간이 감소한 결과 또한 도움 모드의 높은 과제 난이도와 중재 수단으로써의 높은 잠재력을 뒷받침한다. 보조 토크를 적용하여 보행 특성을 살펴본 선행연구를 살펴보면, 도움 모드는 일반 모드와 비교했을 때 보행 속도 13 m/sec 증가, 한발짝률 7.88 step/min 증가, 한발짝 길이 9.52 cm 증가를 보임으로써 본 연구와 상반되는 결과를 나타냈다[29]. 이러한 차이는 본 연구의 참여자가 55세 이상 75세 이하인 중고령자와 노인인 반면, 선행연구는 65세이상 84세 이하의 노인이라는 점 때문인 것으로 보여진다. 외부 토크를 적용하지 않은 정상 모드 시 참여자의 보행 속도를 보면 본 연구에서는 1.33 m/sec, 선행연구에서는 0.98 m/sec로 보행 기능의 큰 차이를 보인 점을 고려했을 때, 보행 속도가 감소한 65세 노인의 경우 보행 보조 로봇이 엉덩관절에 전달한 보조 토크가 즉각적인 보행 기능의 향상을 야기한 것으로 판단된다. 따라서, 평소 보행의 어려움을 겪는 고령자일수록 보행 보조 로봇은 유용하게 사용될 수 있을 것이다. 추후 연구에서는 보행 기능이 저하된 대상과 나이에 따른 노인의 분류를 더욱 세분한 집단을 대상으로 보행 보조 로봇의 영향을 검증할 필요가 있을 것이다. 보행 보조 로봇의 도움 모드를 사용하여 4 주간 걷기 훈련을 실시한 연구를 살펴보면 보행 속도를 46.7%, 한발짝률을 36.0%, 한걸음 길이를 53.0% 향상시켰다고 나타나 중재 전략으로써 도움 모드의 효과성은 입증된 것으로 나타났다. 따라서, 노인들에게 도움 모드를 적용하여 훈련을 실시할 때 어느 정도의 기간이 적응기로써 필요한지 확인해야 할 것이다. 또한, 엉덩관절의 토크를 점진적으로 높여가며 외부 부하를 적용할 필요가 있을 것으로 판단된다.
보행 보조 로봇의 저항 모드는 한발짝 길이 및 시간, 지지기 및 흔듦기, 한발 및 두발 지지기, 부하반응기, 전 흔듦기, 한걸음 길이 및 시간, 한발짝률, 보행속도를 포함한 모든 시공간 보행 변인에서 정상 모드와 차이가 나타나지 않았다. 이러한 결과는 노인들이 엉덩관절에 가해진 저항 토크에도 불구하고, 하지 근육의 활성도를 더욱 높임으로써 외부 토크가 가해지지 않은 상태, 즉 일반 모드와 유사한 보행을 구사한 것으로 판단된다. 그러나 본 연구에서는 시공간 보행 변인만을 확인하여 하지 근육의 활성도를 설명하기 제한되므로, 추후 연구에서 엉덩관절에 저항 토크 적용 시 하지 근육 활성도의 차이가 나타나는지 확인해야 할 것이다. 선행연구를 살펴보면, 노인을 대상으로 실시한 보행 훈련은 무릎관절 굽힘근의 두께와 근력 그리고 발바닥 굽힘근(plantar flexor)의 근력을 향상시켰으나 엉덩관절 굽힘근의 근력 향상은 나타나지 않았다[30]. 보행 과제에서 엉덩 관절이 신체 추진에 큰 역할을 담당한다는 점을 고려했을 때, 보행 훈련 시 엉덩관절에 저항 토크를 적용한다면 선행연구에서 입증하기 어려웠던 엉덩관절 주변 근육의 근력 증가와 더 나은 훈련 효과가 나타날 수 있을것으로 판단된다.
정적 및 동적 안정성이 감소한 노인의 특성상 보행 보조 로봇에서 생성된 외부 저항 및 보조 토크의 적용은 보행 시 우세 다리와 비우세 다리 간의 비대칭성을 증가시킬 것으로 예상하였다. 그러나 연구가설과는 반대로 본 연구에서는 저항 및 보조 토크 모두 두 다리 간 보행의 비대칭성을 유발하지 않았다. 또한, 통계적으로 유의하지는 않았으나 저항 모드는 한발짝 시간, 지지기 및 흔듦기, 한발 지지기, 부하 반응기, 전 흔듦기 변인에서 일반 모드와 도움 모드에 비해 약 0.16-1.25% 더 나은 대칭성을 보여주었다. 이러한 결과는 로봇의 구조적 특성과 토크의 특성에 의한 것으로 보여진다. 본 연구에서 사용한 보행 보조 로봇은 엉덩관절에 위치한 모터 구동계를 이어주는 허리 벨트, 골반 지지대, 대퇴 원위부를 감싸는 스트랩으로 구성되어 있는데 구조물 및 결합부가 주는 안정성이 대칭성에 기여했을 것이다. 또한, 엉덩관절로 전달되는 외부 토크는 좌우 각각 구동되기 때문에, 각 다리가 가진 근력 수준에 상관없이 동일한 부하를 전달하여 대칭성에 기여했을 수 있다. 추후연구에서는 저항 모드를 사용한 장기간 보행 훈련 시 양 다리 간 비대칭성을 개선할 수 있는지 그리고 선호속도보다 빠른 속도 혹은 조깅 운동 시 비대칭성이 나타나는지 확인할 필요가 있다.
본 연구에는 몇 가지 제한점이 존재한다. 첫째, 보행 보조 로봇을 통해 엉덩관절에 적용한 저항 및 보조 토크는 연구참여자의 체중으로 정규화(normalization)하지 못했다. 둘째, 시공간 보행 검사 시 로봇의 정상, 저항, 보조 모드 순서를 무작위화 하지 않았기 때문에 잔류효과(carryover effect)가 존재할 수 있다. 셋째, 본 연구에서는 측정 간 휴약 기간(wash out period)를 가지지 않았고, 6회에 걸친 세가지 모드의 연속된 측정으로 인해 학습효과가 존재할 가능성이 있다. 넷째, 보행 보조 로봇은 보행기능에 문제가 있거나 장애가 있는 사람에게 필요한 장비로 인식되고 있으나, 본 연구에서는 일상생활 및 신체활동에 이상이 없는 사람을 대상으로 수행되었다. 추후 연구에서는 실제로 보행에 어려움을 겪는 사람을 대상으로 보행 보조 로봇의 효과를 검사하여 실질적으로 보행에 도움을 줄 수 있는지 확인할 필요가 있다. 이러한 제한점에도 불구하고 본 연구는 보행 보조 로봇을 활용하여 저항 및 보조 토크 두 가지 유형의 외부 부하가 노인의 시공간 보행 변인에 미치는 영향을 확인한 점에서 의의가 있다. 본 연구에서 보여진 보행 특성은 저항 및 보조 토크를 활용한 보행 훈련의 효과 입증에 도움이 될 수 있을 것으로 기대된다.
결론
엉덩관절 모터 기반 보행 보조 로봇의 저항 및 보조 토크는 노인의 보행 특성을 변화시켰으며, 비대칭성을 증가시키지 않았다. 따라서 보행 보조 로봇은 노인의 보행 훈련 프로그램에 유용하게 활용될 수 있을 것이다. 추후연구에서는 저항 및 보조 토크 적용 시 변화되는 하지 근육 활성도를 확인할 필요가 있을 것이며, 보행 기능이 저하된 집단을 대상으로 보행 보조 로봇의 효과를 확인해야 한다.
Acknowledgements
이 연구는 2020년 한국연구재단 일반공동연구지원사업의 지원을 받아 수행된 연구임(NRF-2020S1A5A2A03044672).
Notes
The authors declare no conflict of interest.